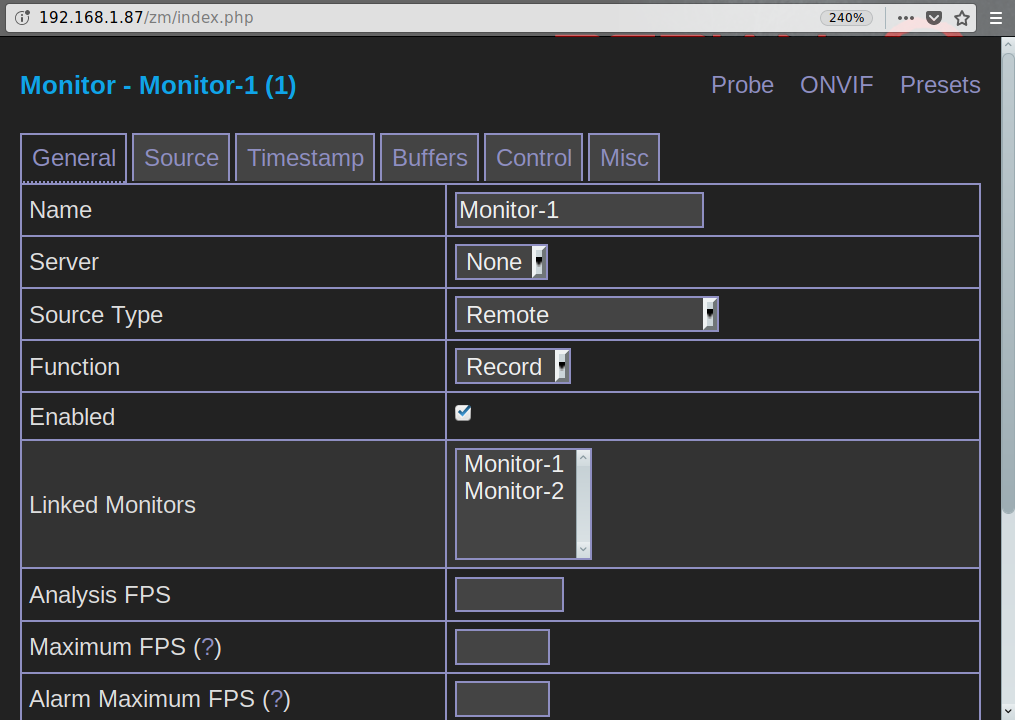
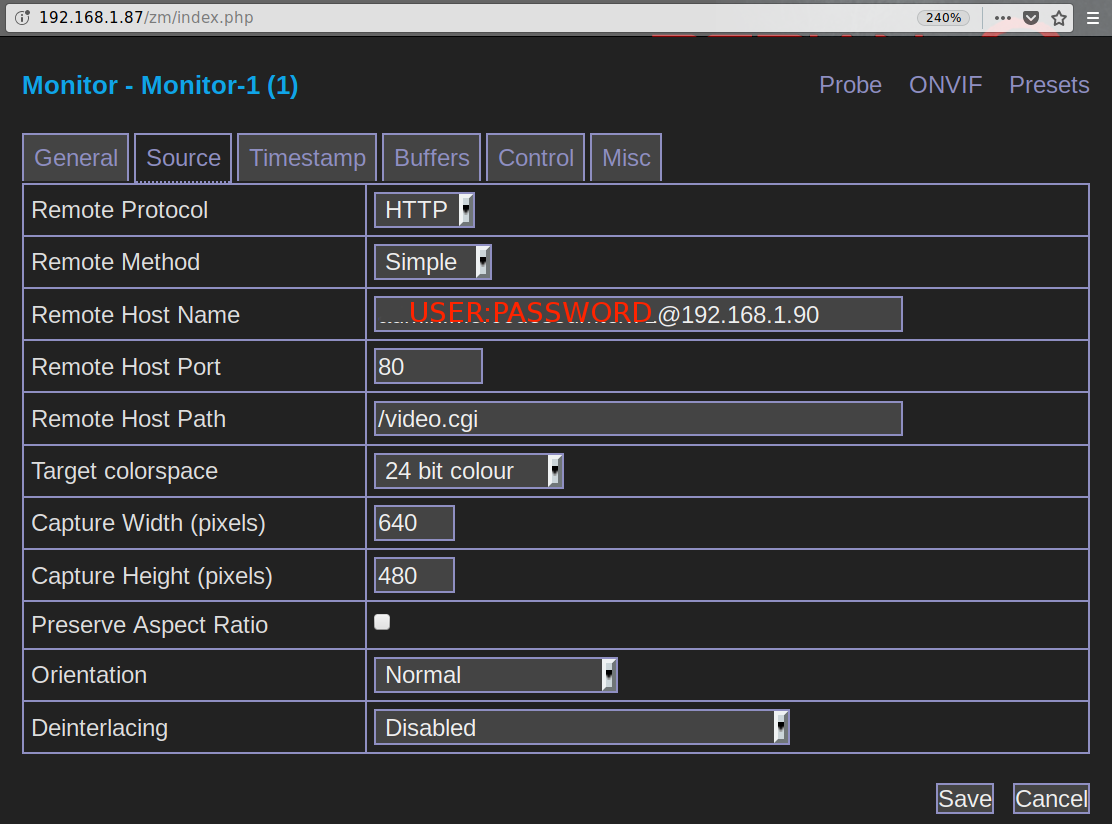
D-Link 5020L e ZoneMinder. Guida su come configurare ZoneMinder con telecamere D.Link 5020L Nel wiki di ZoneMinder si trovano i riferimenti a tutte le telecamere supportate, comprese queste, ma in questa guida ci saranno immagini per tutti i passaggi. I parametri da inserire quando si aggiunge la telecamera sono i seguenti:
Source Type: Remote
Remote Protocol: HTTP
Remote Method: Simple
Remote Host Name: user:pass@IP-Camera
Remote Host Port: 80 (Default)
Remote Host Path: /video.cgi
Colors: 24 bit
Capture width: 640
Capture Height: 480
PTZ Settings:
esiste uno script nel wiki che serve a far funzionare il tutto:
# =========================================================================r
#
# ZoneMinder D-Link DCS-5020L IP Control Protocol Module, $Date: $, $Revision: $
# Copyright (C) 2013 Art Scheel
#
# This program is free software; you can redistribute it and/or
# modify it under the terms of the GNU General Public License
# as published by the Free Software Foundation; either version 2
# of the License, or (at your option) any later version.
#
# This program is distributed in the hope that it will be useful,
# but WITHOUT ANY WARRANTY; without even the implied warranty of
# MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
# GNU General Public License for more details.
#
# You should have received a copy of the GNU General Public License
# along with this program; if not, write to the Free Software
# Foundation, Inc., 59 Temple Place - Suite 330, Boston, MA 02111-1307, USA.
#
# ==========================================================================
#
# This module contains the implementation of the D-Link DCS-5020L IP camera control
# protocol.
#
package ZoneMinder::Control::DCS5020L;
use 5.006;
use strict;
use warnings;
require ZoneMinder::Base;
require ZoneMinder::Control;
our @ISA = qw(ZoneMinder::Control);
our $VERSION = $ZoneMinder::Base::VERSION;
# ==========================================================================
#
# D-Link DCS-5020L Control Protocol
#
# ==========================================================================
use ZoneMinder::Logger qw(:all);
use ZoneMinder::Config qw(:all);
use Time::HiRes qw( usleep );
sub new
{
my $class = shift;
my $id = shift;
my $self = ZoneMinder::Control->new( $id );
bless( $self, $class );
srand( time() );
return $self;
}
our $AUTOLOAD;
sub AUTOLOAD
{
my $self = shift;
my $class = ref($self) || croak( "$self not object" );
my $name = $AUTOLOAD;
$name =~ s/.*://;
if ( exists($self->{$name}) )
{
return( $self->{$name} );
}
Fatal( "Can't access $name member of object of class $class" );
}
sub open
{
my $self = shift;
$self->loadMonitor();
use LWP::UserAgent;
$self->{ua} = LWP::UserAgent->new;
$self->{ua}->agent( "ZoneMinder Control Agent/" . ZoneMinder::Base::ZM_VERSION );
$self->{state} = 'open';
}
sub close
{
my $self = shift;
$self->{state} = 'closed';
}
sub printMsg
{
my $self = shift;
my $msg = shift;
my $msg_len = length($msg);
Debug( $msg."[".$msg_len."]" );
}
sub sendCmd
{
my $self = shift;
my $cmd = shift;
my $result = undef;
printMsg( $cmd, "Tx" );
my $req = HTTP::Request->new( POST=>"http://".$self->{Monitor}->{ControlAddress}."/PANTILTCONTROL.CGI" );
$req->content($cmd);
my $res = $self->{ua}->request($req);
if ( $res->is_success )
{
$result = !undef;
}
else
{
Error( "Error check failed: '".$res->status_line()."'" );
}
return( $result );
}
sub sendCmd2
{
my $self = shift;
my $cmd = shift;
my $result = undef;
printMsg( $cmd, "Tx" );
my $req = HTTP::Request->new( GET=>"http://".$self->{Monitor}->{ControlAddress}."/$cmd".$self->{Monitor}->{ControlDevice} );
my $res = $self->{ua}->request($req);
if ($res->is_success )
{
$result = !undef;
}
else
{
Error( "Error check failed:'".$res->status_line()."'" );
}
return( $result );
}
sub move
{
my $self = shift;
my $dir = shift;
my $panSteps = shift;
my $tiltSteps = shift;
my $cmd = "PanSingleMoveDegree=$panSteps&TiltSingleMoveDegree=$tiltSteps&PanTiltSingleMove=$dir";
$self->sendCmd( $cmd );
}
sub moveRelUpLeft
{
my $self = shift;
Debug( "Move Up Left" );
$self->move( 0, 1, 1 );
}
sub moveRelUp
{
my $self = shift;
Debug( "Move Up" );
$self->move( 1, 1, 1 );
}
sub moveRelUpRight
{
my $self = shift;
Debug( "Move Up" );
$self->move( 2, 1, 1 );
}
sub moveRelLeft
{
my $self = shift;
Debug( "Move Left" );
$self->move( 3, 1, 1 );
}
sub moveRelRight
{
my $self = shift;
Debug( "Move Right" );
$self->move( 5, 1, 1 );
}
sub moveRelDownLeft
{
my $self = shift;
Debug( "Move Down" );
$self->move( 6, 1, 1 );
}
sub moveRelDown
{
my $self = shift;
Debug( "Move Down" );
$self->move( 7, 1, 1 );
}
sub moveRelDownRight
{
my $self = shift;
Debug( "Move Down" );
$self->move( 8, 1, 1 );
}
# moves the camera to center on the point that the user clicked on in the video image.
# This isn't extremely accurate but good enough for most purposes
sub moveMap
{
# if the camera moves too much or too little, try increasing or decreasing this value
my $f = 11;
my $self = shift;
my $params = shift;
my $xcoord = $self->getParam( $params, 'xcoord' );
my $ycoord = $self->getParam( $params, 'ycoord' );
my $hor = $xcoord * 100 / $self->{Monitor}->{Width};
my $ver = $ycoord * 100 / $self->{Monitor}->{Height};
my $direction;
my $horSteps;
my $verSteps;
if ($hor < 50 && $ver < 50) {
# up left
$horSteps = (50 - $hor) / $f;
$verSteps = (50 - $ver) / $f;
$direction = 0;
} elsif ($hor >= 50 && $ver < 50) {
# up right
$horSteps = ($hor - 50) / $f;
$verSteps = (50 - $ver) / $f;
$direction = 2;
} elsif ($hor < 50 && $ver >= 50) {
# down left
$horSteps = (50 - $hor) / $f;
$verSteps = ($ver - 50) / $f;
$direction = 6;
} elsif ($hor >= 50 && $ver >= 50) {
# down right
$horSteps = ($hor - 50) / $f;
$verSteps = ($ver - 50) / $f;
$direction = 8;
}
my $v = int($verSteps + .5);
my $h = int($horSteps + .5);
Debug( "Move Map to $xcoord,$ycoord, hor=$h, ver=$v with direction $direction" );
$self->move( $direction, $h, $v );
}
# this clear function works, but should probably be disabled because
# it isn't possible to set presets yet.
sub presetClear
{
my $self = shift;
my $params = shift;
my $preset = $self->getParam( $params, 'preset' );
Debug( "Clear Preset $preset" );
my $cmd = "ClearPosition=$preset";
$self->sendCmd( $cmd );
}
# not working yet
sub presetSet
{
my $self = shift;
my $params = shift;
my $preset = $self->getParam( $params, 'preset' );
Debug( "Set Preset $preset" );
# TODO need to first get current position $horPos and $verPos
#my $cmd = "PanTiltHorizontal=$horPos&PanTiltVertical=$verPos&SetName=$preset&SetPosition=$preset";
#$self->sendCmd( $cmd );
}
sub presetGoto
{
my $self = shift;
my $params = shift;
my $preset = $self->getParam( $params, 'preset' );
Debug( "Goto Preset $preset" );
my $cmd = "PanTiltPresetPositionMove=$preset";
$self->sendCmd( $cmd );
}
sub presetHome
{
my $self = shift;
Debug( "Home Preset" );
my $cmd = "PanTiltSingleMove=4";
$self->sendCmd( $cmd );
}
# IR Controls
#
# wake = IR on
# sleep = IR off
# reset = IR auto
sub wake
{
my $self = shift;
Debug( "Wake - IR on" );
my $cmd = "setDaynightMode?ReplySuccessPage=night.htm&ReplyErrorPage=errrnight.htm&DayNightMode=3&ConfigDayNightMode=Save";
$self->sendCmd2( $cmd );
}
sub sleep
{
my $self = shift;
Debug( "Sleep - IR off" );
my $cmd = "setDaynightMode?ReplySuccessPage=night.htm&ReplyErrorPage=errrnight.htm&DayNightMode=2&ConfigDayNightMode=Save";
$self->sendCmd2( $cmd );
}
sub reset
{
my $self = shift;
Debug( "Reset - IR auto" );
my $cmd = "setDaynightMode?ReplySuccessPage=night.htm&ReplyErrorPage=errrnight.htm&DayNightMode=0&ConfigDayNightMode=Save";
$self->sendCmd2( $cmd );
}
1;
__END__
# Below is stub documentation for your module. You'd better edit it!
=head1 NAME
ZoneMinder::Database - Perl extension for DCS-5020L
=head1 SYNOPSIS
use ZoneMinder::Database;
DLINK DCS-5020L
=head1 DESCRIPTION
ZoneMinder driver for the D-Link consumer camera DCS-5020L.
=head2 EXPORT
None by default.
=head1 SEE ALSO
See if there are better instructions for the DCS-5020L at
http://www.zoneminder.com/wiki/index.php/Dlink
=head1 AUTHOR
Art Scheel <lt>ascheel (at) gmail<gt>
=head1 COPYRIGHT AND LICENSE
LGPLv3
=cut
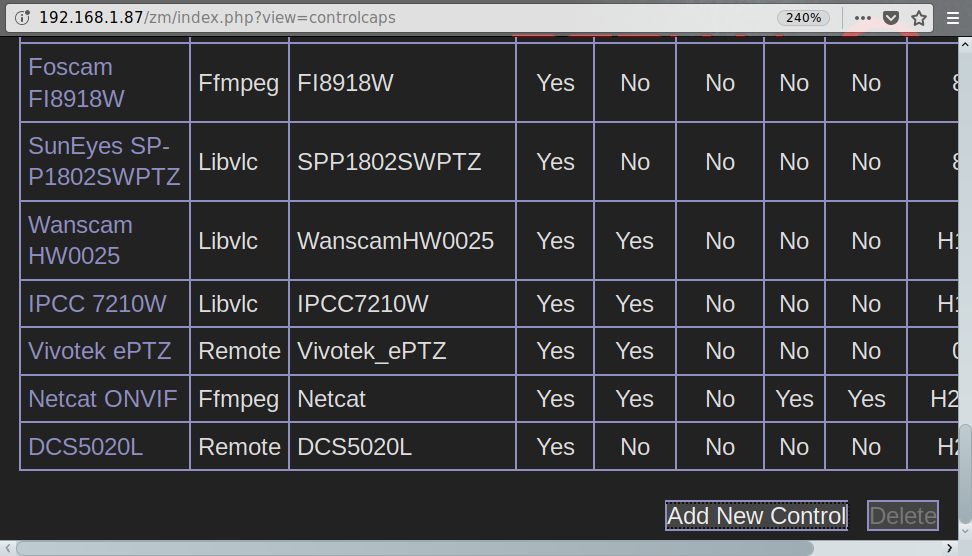
e va copiato nel PATH: /usr/share/perl5/ZoneMinder/Control. Dopodichè andare nel menu Control-Edit-Add New Control:
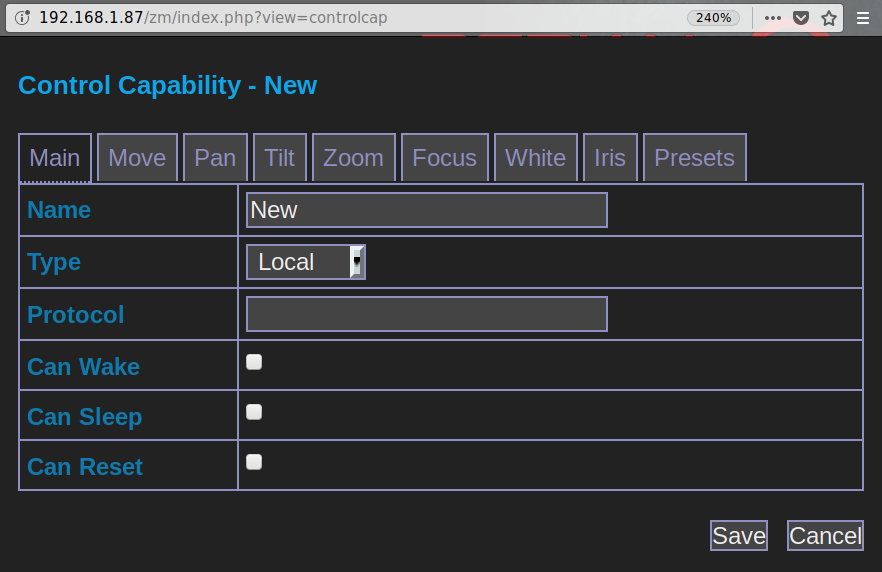
ed inserire i parametri seguenti:
Main: Type: Remote, Protocol: DCS5020L, Name: DCS5020L, Can Wake, Can Sleep, Can Reset
Move: Can Move, Can Move Diagonally, Can Move Mapped, Can Move Relative
Pan: Can Pan, Min Pan Step 1, Max Pan Step 30
Tilt: Can Tilt, Min Tilt Step 1, Max Pan Step 30
Presets: Has Presets, Number: 24, Has Home Preset
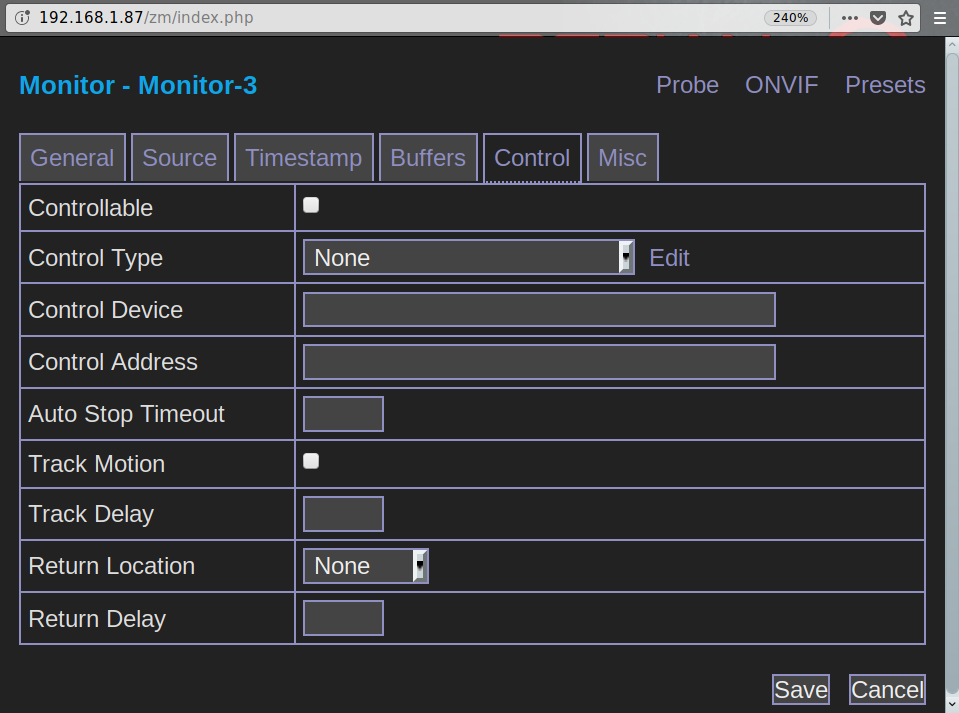
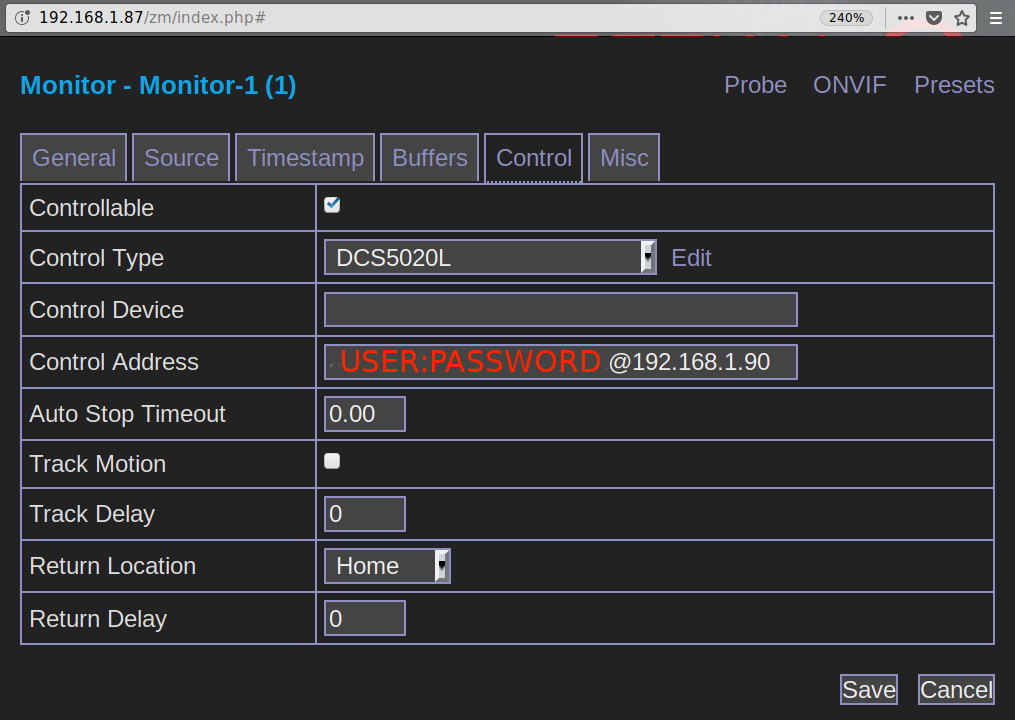
Nel Tab Control inserire:
Controllable, Control Type: DCS5020L, Control address: user:pass@ipaddress
D-Link 5020L e ZoneMinder
adesso tutto è pronto per la video sorveglianza.
enjoy 😉